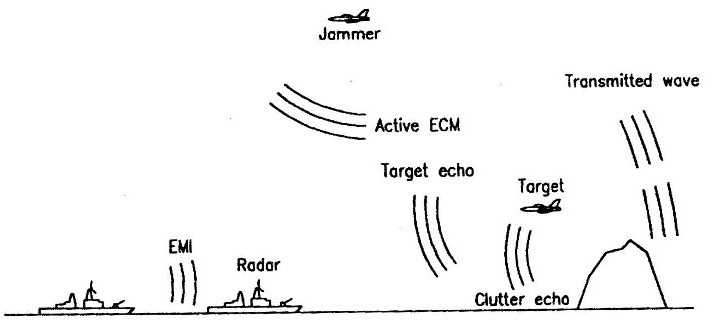
Pada kondisi riil, sinyal yang diterima oleh receiver radar tidak murni pantulan dari target (target echo). Akan tetapi merupakan campuran dengan sinyal-sinyal lainnya yang sesungguhnya tidak diinginkan. Sinyal yang tidak diinginkan ini memiliki kecenderungan mengganggu, dan sinyal ini dinamakan sinyal interferensi yang terdiri dari banyak sinyal, seperti yang tampak pada gambar di atas, yaitu emi (electromagnetik interference), clutter echo, active ecm (electronic counter measure) dan lain-lain.
4-1. Radar Cross-Section (RCS): Definisi dan Fundamental
Paremater yang pertama akan dibicarakan adalah mengenai pantulan dari target (target echo), dan faktor utama yang mempengaruhi besarnya pantulan target adalah Radar Cross-Section (RCS). Yaitu suatu variabel yang digunakan untuk mengukur refleksi target sinyal searah antena penerima radar. Sebuah RCS target didefinisikan sebagai rasio antara reflected power yang efektif secara isotropik dengan kerapatan incident power
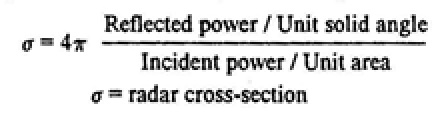
Konsep ditunjukkan dalam Persamaan. 4-1 dan diilustrasikan pada Gambar. 1-38. Perhatikan bahwa hanya dalam model saja radiasi target terjadi secara isotropis, dan model ini hanya berlaku searah radar. Hanya daya (power) yang terrefleksikan terhadap radar saja yang merupakan bagian dari RCS.
Contoh 4-1:
Sebuah target pada kisaran 5000 m merefleksikan daya sedemikian rupa sehingga daya sebesar -58 dBm muncul pada keluaran antena dengan luasan efektif 10 m2. Kerapatan daya illuminati/pencahayaan pada sasaran adalah 20 mW/m2. Cari besar radar cross-section dari target.
Solusi:
Luas permukaan bola berjari-jari 5000 meter adalah 3,142 x 108 m2. Kerapatan daya echo pada antena radar dihitung sebagai 1,58 x 10-10 W/m2. Oleh karena itu daya radiasi total efektif yang isotropis dari target didapat 0,0498 W (dihitung dari kerapatan daya dikali lingkup area). Daya radiasi isotropis efektif tiap satuan sudut yang solid adalah 0,00396 W/steradian, yang merupakan daya total lingkup dibagi dengan 47r steradians tiap lingkupnya. Daya illuminasi/pencahayaan per satuan luas pada target diberikan sebagai 0,020 W/m2. Oleh karena itu radar cross-section, dari Persamaan. 4-1, adalah 2.49 m2. Jumlah ini dapat dikonfirmasi dengan menerapkan pemberian kerapatan daya illuminati pada target dan pemberian RCS sebesar 2.49 m2 untuk persamaan radar dalam Bab 3, hasilnya merupakan kesesuaian daya yang diterima dengan yang diberikan.
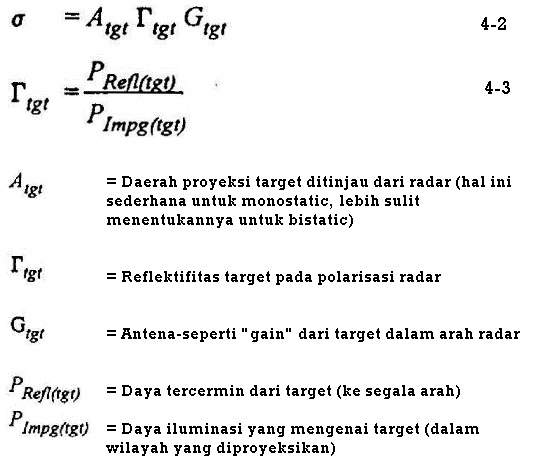
RCS components: Radar cross-section terdiri dari tiga komponen: daerah target, reflektifitas target pada polarisasi antena penerima radar, dan antena-seperti “gain” dari target.
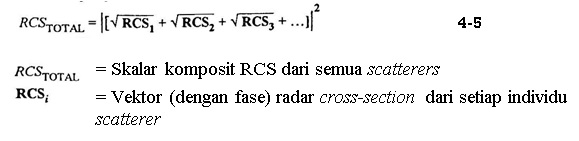
RCS units: Radar Cross-Section adalah, seperti yang ditunjukkan pada Persamaan. 4-1, dalam satuan wilayah (sudut yang berdimensi). Daerah ini biasanya dituliskan dalam meter persegi, meskipun beberapa penulis bertahan dalam menggunakan sentimeter persegi dan kaki persegi. Decibel yang setara dengan meter persegi adalah dBsm, untuk sentimeter persegi setara dengan dBscm, dan dBsf untuk meter persegi. Untuk mengkonversi dari dBscm ke dBsm, kurangi 40,0 dB. Untuk mengkonversi dari dBsf ke dBsm, kurangi 10,32 dB.
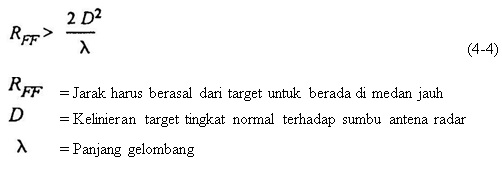
Target field zones: Target, seperti antena, memiliki daerah cakupan dekat dan jauh (near and far fields). Pada daerah cakupan dekat, gelombang tercermin dari target adalah bulat (spherical). Pada daerah cakupan jauh, gelombangnya adalah planar sampai 1/8 panjang gelombang. Hal ini berbeda dengan antena, di mana kesalahan maksimum adalah 1/16 panjang gelombang. Target radar dapat memiliki kesalahan fase 1/16 panjang gelombang setiap jalan, penjumlahan 1/8 panjang gelombang untuk round trip.
Target RCS berfluktuasi pada dua parameter yaitu amplitudo dan fase. Fluktuasi pada amplitudo, disebut scintillation, menghasilkan variasi dalam besar daya echo target yang diterima. Fluktuasi fase, disebut glint, mempengaruhi bagian gelombang yang berecho dari target. Target Non-glinting far-field kurang lebih merefleksikan gelombang planar. scintillation dan glint saling terkait satu sama lain dan akan dibahas kemudian dalam bab ini. Keduanya dapat terjadi secara perlahan atau cepat, sebagaimana didefinisikan di bawah.
–RCS fluctuation speeds: Fluktuasi target yang lambat (Gambar 4-1) adalah suatu fluktuasi di mana waktu konstan variasinya lebih besar dari waktu tampilan radar. RCS ini tidak bervariasi secara signifikan selama waktu tampilan, tetapi tidak bervariasi juga dari proses scaning untuk memindai dalam radar pencari. Dalam sistem tracking dan modenya, fluktuasi lambat tidak signifikan dalam melihat target, tetapi signifikan untuk waktu yang lama. Untuk fluktuasi lambat, pulse to pulse variasi RCS tidak signifikan. Fluktuasi target yang cepat adalah suatu fluktuasi di mana RCS target bervariasi secara signifikan dari pulsa ke pulsa (pulse to pulse).
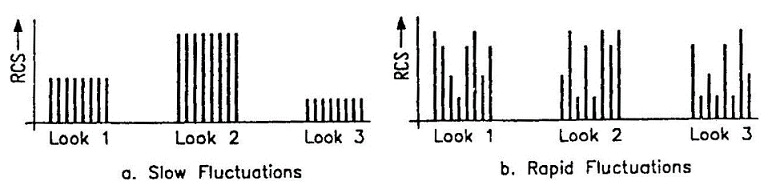
Gambar 4-1. Lambat dan Cepat Fluktuasi.
Fluctuation mechanisms: Semua diskusi di bagian ini mengasumsikan radar memiliki resolusi rendah, yang berarti bahwa resolusi ukuran sel radar adalah lebih besar dari target (target titik). Kemudian dalam bab ini, akan dibahas target area (clutter darat dan laut) dan target volume (clutter cuaca dan chaff). Definisi target titik, area, dan volume berada di Sub. 3-2. Diskusi ini membantu untuk mengingat bahwa bidang echo di radar adalah jumlah vektor bidang dari semua scatterers dalam sel resolusi radar. RCS yang dihasilkan dari target tertentu biasanya merupakan hasil pengukuran resolusi rendah, yang berarti bahwa pengukuran radar adalah resolusi rendah untuk target yang diukur.
- Fluktuasi target diperpanjang (Fluctuation of extended targets): Penyebab pertama fluktuasi target ditunjukkan pada Gambar. 4-2. Sebuah extended targets dengan medan cakupan jauh, seperti silinder tipis, dapat dianggap terdiri dari sejumlah unsur scatterers kecil. Total RCS ini adalah jumlah vektor dari kontribusi semua elemen scatterers dan tergantung pada sudut di mana radar memandang [mereka/nya]. Sudut pandang pada bidang horisontal dikenal sebagai sudut aspek (aspect angle) target. Dalam bidang vertikal, itu disebut sudut kemiringan (tilt angle). Dengan target pesawat, hidung pesawat biasanya dipertimbangkan sebagai aspek nol (zero aspect) dan roll-pitch (pergerakan naik turun) pesawat sebagai nol miring (zero tilt).
Pada aspek nol (normal silinder dalam kasus ini), semua unsur scatterers memiliki jarak yang sama dari radar, dan sinyal echo dari unsur scatterers tiba sefase satu sama lain (penjumlahan tengah dalam Gambar. 4-2). Hal ini menghasilkan RCS maksimum untuk target tertentu.
Sebagai perubahan sudut aspek, jarak relatif dari perubahan unsur scatterers, menyebabkan penjumlahan vektor yang berbeda pada radar. Perhatikan bahwa dalam penjumlahan kedua dari atas,
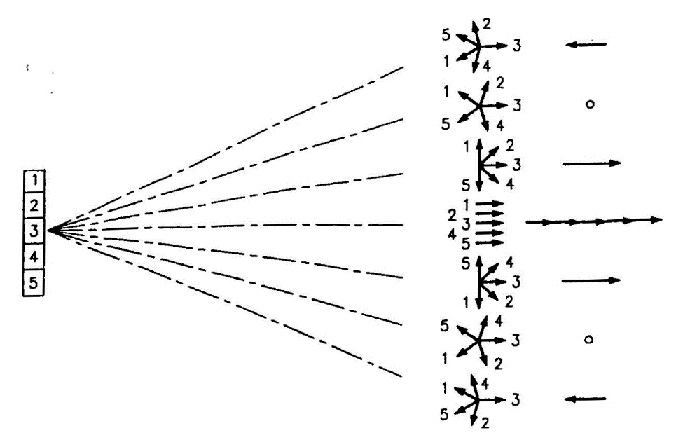
Gambar 4-2. Fluktuasi dari extended scatterer tunggal.
jumlah sinyal elemental untuk null dan RCS dari target menjadi nol. Sudut yang berbeda menyebabkan penjumlahan yang berbeda, dalam hal ini, semua terjadi untuk yang kurang dari aspek nol (zero aspect).
- Fluktuasi array scatterers dibandingkan aspek (Fluctuation of arrays of scatterers versus aspect): Penyebab kedua fluktuasi RCS adalah sudut aspek dari mana target kompleks dengan banyak scatterers dipandang. Kebanyakan target berupa pesawat, misalnya, memiliki RCS yang merupakan penjumlahan dari berbagai pusat hamburan individu (individual scattering) pada target (lihat Gambar 4-11 untuk contoh.). Penjumlahan di radar dari pusat-pusat hamburan ini sangat tergantung dari aspek, terutama jika scatterers adalah panjang gelombang yang terpisah.
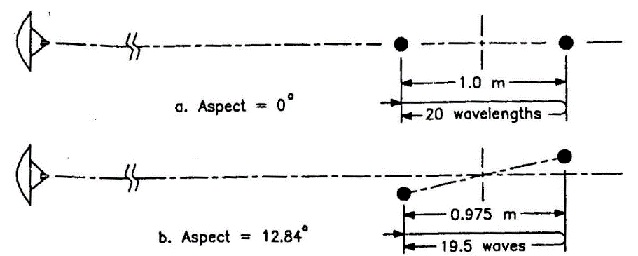
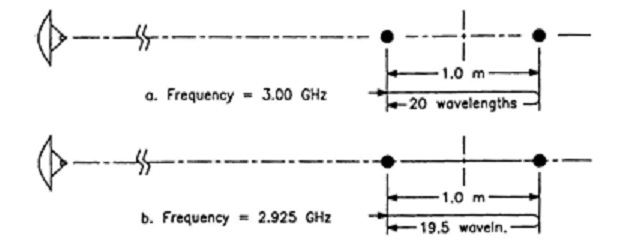
Sebuah target sederhana ditunjukkan pada Gambar. 4-3. Dua scatterers isotropik yang sama (menyebar merata ke segala arah) dipisahkan satu sama lain pada jarak 1 m. Scatterers isotropik memiliki RCS yang sama, terlepas dari aspek – hanya bentuk sphere saja dan panjang gelombang target jauh lebih kecil daripada panjang gelombang yang isotropik. Dalam hal ini, aspek nol didefinisikan dalam Gambar 4-3a, dengan scatterers dipisahkan hanya dalam jangkauan tertentu. Radar tidak menyelesaikan scatterers, dan scatterers terdepan tidak membayangi scatterers belakang. Frekuensi 3,00 GHz (panjang gelombang 0,10 m) dan scatterers dipisahkan oleh 20,0 panjang gelombang round trip.
Pada aspek sama dengan nol, sinyal-sinyal dari setiap scatterer tiba di radar se-fase dan jumlah resolusi rendah RCS adalah maksimal. Jika RCS dari individu scatterers ialah satu unit, pasangan (pair) resolusi rendah RCS adalah empat unit karena penjumlahan medan (sesuai dengan tegangan dan arus). Ini memberikan dua kali “tegangan,” tapi RCS bekerja dalam besaran daya, dan daya sebanding dengan kuadrat tegangan. Jumlah komponen RCS sebagai berikut
Gambar 4-3. Aspek Ketergantungan RCS untuk Target Complex.
Asumsikan sekarang bahwa pasangan scatterer diputar sehingga pandangan radar terletak pada aspek 12,84 ° (Gambar 4-3b). Jarak antar scatterers sekarang hanya terpisah dalam jangkauan 0.975 m, dan jarak listrik antara mereka adalah 19,5 panjang gelombang (round trip). Vektor sinyal searah radar tidak se-fase, dan tercipta arus pendek satu sama lain. RCS yang dihasilkan di radar adalah nol.
Pada aspek 12,84 °, total sinyal echo dari dua scatterers tidak nol, tetapi hanya jumlah ke null yang searah radar saja, yang memberikan RCS radar adalah nol. Di arah lain, penjumlahan sinyal memiliki nilai tidak nol. Jika dilihat dengan sebuah radar bistatic yang penerimanya berada pada sudut 28.32 ° dari pemancar (15.48 ° dari nol aspek), RCS dari target ini adalah maksimum untuk empat unitnya jika masing-masing scatterer memiliki satu unit RCS (Gambar 4 -4).
- Fluktuasi target kompleks sebagai fungsi dari frekuensi: Penyebab ketiga dari hasil fluktuasi RCS dengan pendeteksian target pada frekuensi yang berbeda. Gambar 4-5a menunjukkan kesamaan dua scatterers isotropik pada Gambar. 4-3a. Pada frekuensi 3,00 GHz, scatterers dipisahkan oleh 20 perjalanan panjang gelombang round trip dan RCS-nya bernilai maksimum. Pada frekuensi 2.925 GHz (X = 0,1026 m), scatterers adalah 19,5 panjang gelombang round trip terpisah dan RCS adalah nol.
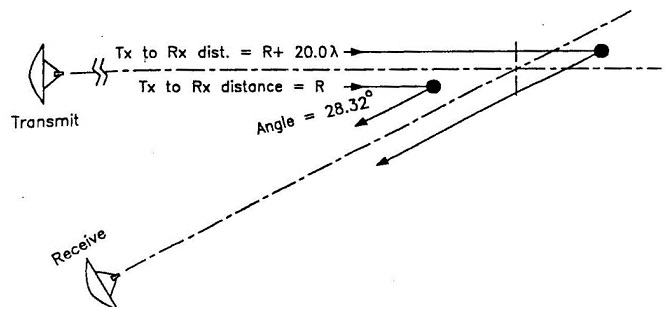
Gambar 4-4. Bistatic RCS Target Gambar Sebelumnya.
Perhatikan lagi bahwa ini adalah RCS hanya dalam arah radar. Untuk sudut bistatic dari 15,94 °, RCS pada frekuensi ini maksimum
Gambar 4-5. Frekuensi Ketergantungan RCS.
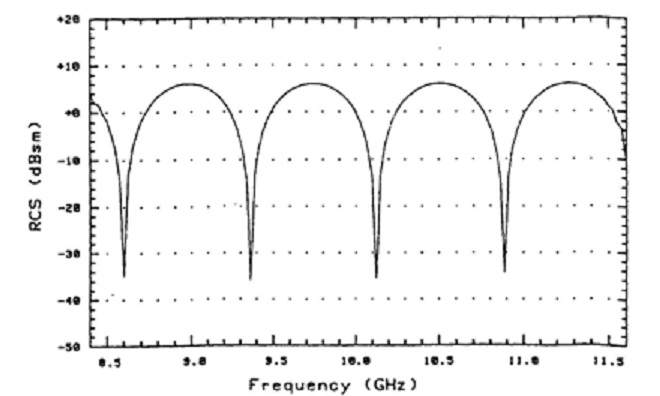
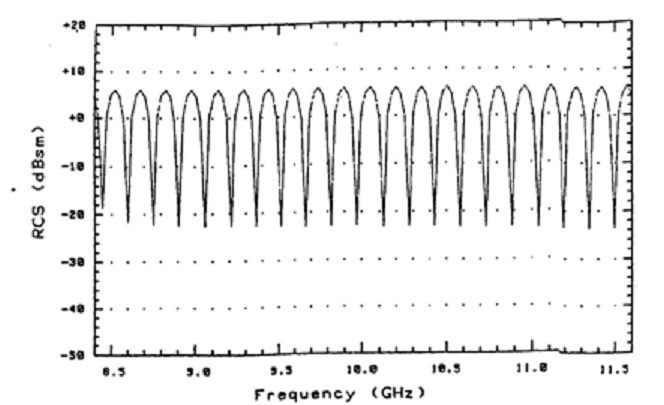
Jarak dari scatterers dan panjang gelombang menentukan jumlah fluktuasi untuk perubahan frekuensi tertentu. Gambar 4-6 dan 4-7 menunjukkan dua isotropik 1.0-m2 scatterers yang dipisahkan oleh 0,2 m dan 1,0 m, masing-masing, dan diilluminasikan (diterangi) dalam X-Band. Perhatikan bahwa scatterers berjarak dekat (Gambar 4-6) memerlukan perubahan frekuensi besar untuk fluktuasi RCS yang signifikan. Lebih lebar jarak, semakin besar fluktuasi RCS dengan perubahan frekuensi kecil (Gbr. 4-7).
Gambar 4-6. Tanggapan Frekuensi dari dua 1,0 m2 scatterers Isotropic yang Terpisah 0,2 m.
Gambar 4-7. Tanggapan Frekuensi dari dua 1,0 m2 scatterers Isotropic yang dipisahkan 1,0 m.
– Fluktuasi dari multipath: Penyebab keempat adalah fluktuasi multipath, ditunjukkan pada Gambar. 4-8. Empat jalur sinyal menghubungkan radar dan target, d-d, d-r, r-d, dan r-r (Sub. 3-4). Karena perubahan jangkauan, jumlah dari empat perubahan sinyal, radar cross-section target dapat bervariasi dari 0 (jalur sirkuit pendek satu sama lain) sampai 16 kalinya target tanpa refleksi (4 kali tegangan, 16 kali daya). Gain 12 dB ini memiliki keuntungan yang digunakan dalam melakukan pengukuran RCS yang disebut ground-plane ranges.
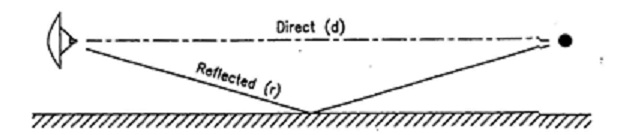
Gambar 4-8. Fluktuasi target yang Disebabkan oleh Multipath.
Sebagai ilustrasi, diasumsikan jarak radar ke target adalah 3,000.0 m dan jarak keduanya (target dan radar) di atas permukaan refleksi sempurna ialah 15.0 m. Panjang jalur refleksi adalah 3.000,15 m. Jika frekuensi 3,00 GHz (X = 0,100 m), jalan dd (round trip) adalah 60.000 panjang gelombang (21.600.000 °) lama. Jalur lainnya adalah dr = rd = 60,001.5 panjang gelombang (21.600.720 °, termasuk refleksi dari 180 °) dan rr dari 60.003 panjang gelombang (21.601.440 °, termasuk dua refleksi dari 180 ° masing-masing). Keempatnya berada dalam fase dan selama mereka tidak diselesaikan, resolusi RCS rendah adalah 16 kali dari target.
Jika rentang turun menjadi 2.250 m, panjang jalan baru adalah: dd dari 45,00,) panjang gelombang (16.200.000 °), dr dan rd dari 45.002 panjang gelombang (16.200.900 °, termasuk refleksi 180 °) dan rr dari 45.004 panjang gelombang (16201800 ° dengan dua refleksi). dengan menghapus
kelipatan 360 °, terlihat bahwa dd dan sinyal rr tiba di-fase dan sinyal dari rd dan jalan dr tiba di 180 ° fase dari dua lainnya, sehingga dalam RCS monostatic dari nol.
4-3. Target Fluktuasi Model
Ada banyak model fluktuasi RCS. Yang paling umum digunakan adalah dari Marcum [7] dan Swerling [8]. Lima Marcum / Swerling model menggambarkan perilaku dari berbagai target. Konsep mereka diilustrasikan pada Gambar. 4-9
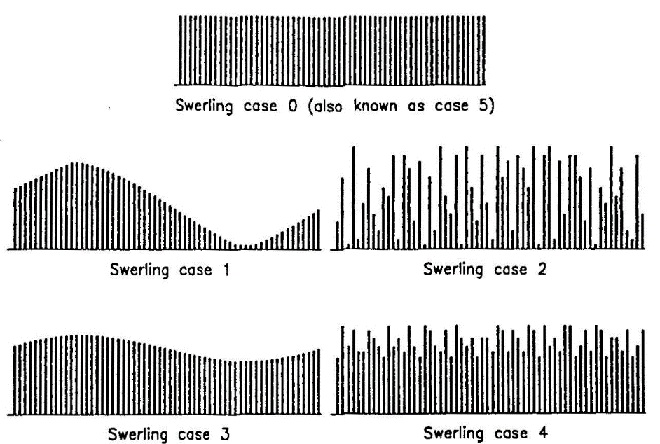
Gambar 4-9. Marcum dan Swerling Kasus.
– Marcum, juga dikenal sebagai Swerling 0 kasus dan kasus Swerling 5 target, non-berfluktuasi. Mereka dimodelkan sebagai scatterers isotropik tunggal. Seperti disebutkan sebelumnya, bola saja dan target jauh lebih kecil dari panjang gelombang dari sinyal pencahayaan adalah target Marcum.
- Kasus Swerling Saya menargetkan menunjukkan fluktuasi yang besar, biasanya beberapa kali lipat, dengan fluktuasi yang terjadi perlahan-lahan. Mereka dimodelkan sebagai scatterers beberapa approxi ¬ radar mately sama penampang. Kasus 1 umumnya cocok untuk target kompleks seperti pesawat radar tanpa pulsa-ke-pulsa frekuensi kelincahan, baik di rentang panjang atau terbang menuju atau jauh dari radar. Dalam kedua kasus, ada aspek perubahan sedikit lebih melihat.
-
Swerling kasus 2 target menunjukkan fluktuasi yang besar, terjadi dengan cepat. Kasus ini dimodelkan sama dengan kasus 1. Ini sesuai target yang kompleks di mana aspek yang berubah dengan cepat, pada jarak dekat. Hal ini juga sesuai target kompleks untuk radar dengan pulsa-pulsa ke-kelincahan frekuensi.
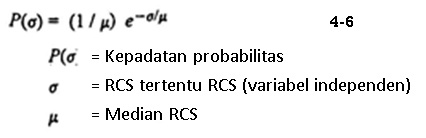
Kasus 1 dan kasus 2 target dijelaskan statistik seperti ditunjukkan pada persamaan di bawah ini, dan kepadatan probabilitas mereka diberikan pada Gambar. 4-10.
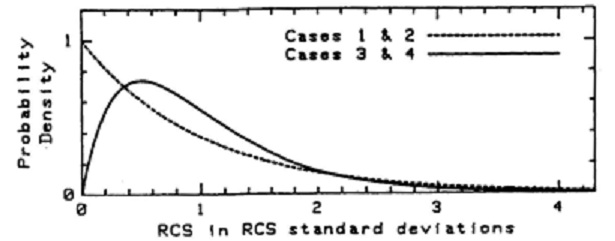
Gambar 4-10. Probabilitas densiti untuk kasus swerling.
Swerling kasus 3 target menunjukkan fluktuasi yang lebih kecil, biasanya urutan besarnya atau kurang, dan berfluktuasi perlahan. Mereka dimodelkan sebagai satu scatterer menonjol dengan scatterers lebih kecil. Model ini cocok target sederhana, seperti beberapa rudal, di mana rentang perubahan aspek kecil atas melihat. Hal ini juga sesuai target yang kompleks yang augmented (memiliki mereka RCS dibuat artifisial lebih besar) dengan augmentor tunggal. Contohnya adalah pesawat tanpa awak pesawat target kecil ditambah dengan lensa Lüneburg tunggal (lihat Sec. 4-4).
- Kasus Swerling 4 adalah sama dengan kasus 3 kecuali bahwa fluktuasi terjadi dengan cepat, baik dari aspek perubahan yang cepat atau dari kelincahan frekuensi radar. Deskripsi statistik kasus 3 dan 4 diberikan di bawah ini dan dalam Gambar. 4-10.
![]()
Contoh 4-2: Menggunakan geometri Gambar. 4-3, menemukan maksimum dan RCS minimal dua scatterers dipisahkan oleh 2,20 m dan diterangi di 3,05 GHz. Salah satu scatterers memiliki RCS dari 1,0 m2 dan yang lainnya adalah 2,0 m2. Jika nol aspek seperti yang ditunjukkan pada Gambar. 4-3a, menemukan salah satu sudut yang menghasilkan maksimum RCS dan salah satu sudut yang menghasilkan RCS minimum. Asumsikan scatterers tidak menaungi satu sama lain.
Solusi: Panjang gelombang adalah 9,836 cm (0,09836 m). Pada nol aspek, scatterers adalah 22,367 panjang gelombang terpisah (satu arah). Aspek terkecil yang menghasilkan maksimum RCS akan memiliki scatterers dipisahkan oleh 22.000 panjang gelombang dalam jangkauan. Aspek terkecil untuk maksimum RCS karena itu Biaya (22.000/22.367), atau 10,39 °. RCS adalah dalam hal kekuasaan, tetapi penjumlahan adalah bidang, yang diperlakukan sebagai tegangan. Kontribusi terhadap penjumlahan scatterer setiap akar kuadrat dari yang RCS. Oleh karena itu jumlahnya adalah 1.000 + 1,414, atau 2,414. Untuk menemukan RCS maksimum, jumlah ini harus kembali ke istilah listrik dengan menjadi kuadrat, memberikan 5,83 m2.
Kasus perubahan melalui pembesaran target: Sangat menarik untuk melihat apa yang terjadi pada target yang kompleks, seperti tanpa pilot kecil, bila ditambah untuk memberikan radar cross-bagian pesawat yang jauh lebih besar (Gbr. 4-11). Sebagai contoh, sebuah pesawat tak berawak sasaran BQM-34 dapat ditambah dengan penampang radar sebuah pembom Bear Soviet. The BQM-34 secara inheren kasus 1 atau 2, tergantung pada waktu tampilan dan perubahan aspek. Jika ditambah dengan scatterer tunggal yang besar, itu menjadi kasus 3 atau 4. Dalam sebagian besar keadaan, kasus 3 dan 4 target yang lebih mudah untuk mendeteksi dan melacak akurat daripada kasus 1 dan 2 (Bab 5 dan 7). Dengan demikian, karakter seluruh target diubah melalui augmentation. Gambar 4-12 menunjukkan sinyal kembali yang diharapkan sebelum dan sesudah augmentasi.
Pertanyaan: Jika Anda diminta untuk meningkatkan target kecil sampai sepuluh kali RCS alam dan memilikinya tetap terjadi 1 atau 2, bagaimana Anda akan melakukannya? Petunjuk: Lihat definisi kasus.
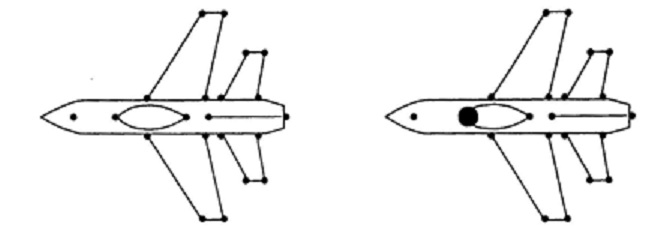
Gambar 4-11. Augmentasi Target Kecil dengan scatterer Large Single.
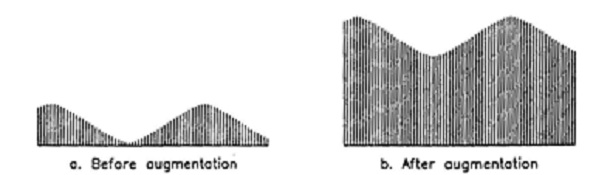
Gambar 4-12. Hipotesis RCS Target (Gambar 4-11) Sebelum dan Sesudah Augmentation.
RCS fluctuations and Nyquist sampling: Dalam rangka untuk sepenuhnya menggambarkan informasi dari sampel, setiap siklus sinusoidal informasi harus sampel lebih dari dua kali, sampel harus kurang dari 180 ° terpisah (Nyquist Sampling kriteria – Ch 6.). Radar Target RCS adalah informasi dan deskripsi harus mematuhi hukum yang sama informasi sebagai sinyal lainnya. Oleh karena itu, untuk sepenuhnya menggambarkan target, pengukuran RCS harus dibuat sedemikian rupa sehingga perubahan echo sasaran fase komposit kurang dari 180 ° antar sampel dalam aspek (rotasi horisontal), tilt (rotasi vertikal), dan frekuensi. Contoh berikut mengilustrasikan.
Contoh 4-3: Asumsikan target pesawat adalah 60 kaki panjang, memiliki lebar sayap 40 kaki, dan diterangi di 10,0 GHz. Cari jumlah sampel dan jarak sampel yang diperlukan untuk sepenuhnya menggambarkan target seperti yang berputar 360 ° di satu pesawat saja (asumsikan aspek) dan pada satu frekuensi. Cari jumlah sampel yang diperlukan untuk sepenuhnya menggambarkan pesawat seperti yang diputar di kedua aspek dan kemiringan pada frekuensi yang sama. Berapakah jarak maksimum antara frekuensi sampel untuk sepenuhnya menggambarkan target ke radar frekuensi tangkas?
Solusi: Dimensi terpanjang dan panjang gelombang mengatur sampel frequency. Enam puluh kaki adalah 18,288 m. Panjang gelombang adalah 0,0300 m. Scatterers pada ekstrem harus bergerak dalam kisaran (dan dengan demikian fase di radar) antara sampel kurang dari 180 °. Ekstremitas target adalah 18,288 m terpisah, dan perubahan antar sampel harus kurang dari 1/4 panjang gelombang, atau 0,0075 m. (Gerak fisik hasil panjang gelombang 1/4 dalam perubahan fasa dari sinyal echo dari 180 ° round trip.) Trigonometri dasar menunjukkan bahwa gerakan sudut antara sampel harus kurang dari 0,02359 °, Tan-1 (0.0075/18.288). Jadi harus ada lebih dari 15.320 sampel untuk sampel Nyquist target lebih dari 360 ° rotasi dalam satu pesawat.
Dalam dua dimensi sudut, sampel masing-masing harus menempati kurang dari 0.0005520 derajat persegi (0,02359 derajat kuadrat). Ada 41,253.0 derajat persegi di sebuah bola. Dengan demikian, 74.731.592 sampel yang diperlukan untuk sepenuhnya menggambarkan target – pada satu frekuensi.
Rentang Target terbesar adalah 609,6 panjang gelombang (18,288 m dibagi dengan 0,03 m). Perubahan frekuensi maksimum harus sedemikian bahwa jumlah perubahan dengan kurang dari 1/4 panjang gelombang (round trip kurang dari 1/2 panjang gelombang). Untuk frekuensi sampel berikutnya yang lebih tinggi, target dapat tidak lebih besar dari panjang gelombang 609,85, dan pada frekuensi yang lebih rendah berikutnya, tidak kurang dari 609,35 panjang gelombang. Frekuensi yang lebih tinggi memiliki panjang gelombang tidak kurang dari 0.0299877 m, atau frekuensi 10,004101050 GHz, dan panjang gelombang yang lebih rendah harus tidak lebih besar dari 9,995898950 GHz. Sampel frekuensi harus tidak lebih dari sekitar 4,0 MHz terpisah.
Komentar: Contoh ini menggambarkan masalah yang dihadapi dalam mencoba untuk sepenuhnya menggambarkan RCS dari target radar. Kesulitan ini diperparah oleh kenyataan bahwa mungkin ada dua contoh dari jenis pesawat yang sama, dan mereka dapat berubah cukup dalam penerbangan (kontrol permukaan, flaps, pemanasan aerodinamis, knalpot bulu, dan sebagainya) untuk lebih rumit. Jelas, penyederhanaan yang diperlukan untuk membuat masalah dikelola.
4-4. Radar Cross-Section of Shapes Fundamental
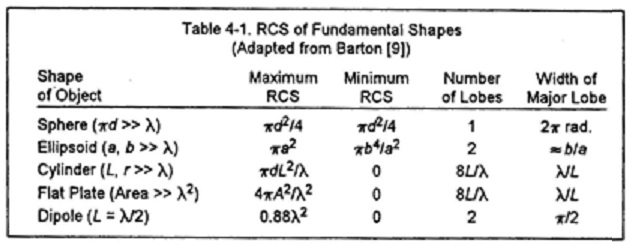
Tabel 4-1 adalah ringkasan dari beberapa bentuk yang berguna dalam memvisualisasikan RCS target lebih kompleks. Sebuah diskusi tentang target mendasar ini dan lainnya berikut meja.
Sphere radar cross-section: Spheres adalah radiator isotropik. Selama keliling jauh lebih besar bahwa panjang gelombang, bola memiliki gain antena-seperti persatuan. Jadi yang RCS, dari Persamaan. 4-2, adalah Spheres adalah radiator isotropik. Selama keliling jauh lebih besar bahwa
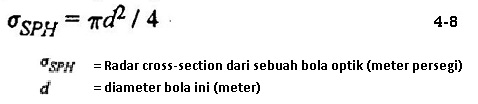
panjang gelombang lentur jauh lebih sedikit dibandingkan lingkar, bola ini RCS sama dengan optik penampang. Jika panjang gelombang mendekati atau lebih besar dari lingkar, RCS adalah seperti ditunjukkan pada Gambar. 4-13. Di daerah resonansi, di mana lingkar adalah dari sekitar 0,5 sampai 5 panjang gelombang, RCS dapat bervariasi dari sekitar 0,3 sampai 3,5 kali optical cross-section. RCS yang tepat dari bola telah dipecahkan oleh beberapa penulis dan diberikan di bawah ini. Ini adalah RCS hanya analitis yang tepat untuk diperiksa di sini.
Gambar 4-13. Sphere RCS vs Frekuensi
Untuk bola dengan lingkar jauh lebih besar daripada panjang gelombang, sisi kanan persamaan. 4-9 menjadi kesatuan. Ini adalah wilayah optik lingkup ini. Untuk Lingkar antara sekitar 0,5 panjang gelombang dan panjang gelombang 10, rasio RCS ke optik penampang berosilasi tentang kesatuan, dengan nilai puncaknya terjadi pada kr, m 1. Ini adalah wilayah resonansi, atau MIE. Untuk lingkar jauh lebih sedikit daripada panjang gelombang, rasio RCS ke optik penampang menjadi sebanding dengan (kr) 4. Ini adalah wilayah hamburan Rayleigh.
Hamburan Rayleigh daerah, di mana RCS dari setiap tetes sebanding dengan kekuatan keempat diameternya, adalah premis yang berfungsi radar cuaca. Para hujan kemungkinan terbesar adalah sekitar 1/4 in diameter dan Rayleigh scatterers pada frekuensi hingga sekitar Band X-, dalam band yang lebih tinggi mereka menjadi resonan. Hal ini diasumsikan bahwa cuaca kekerasan dikaitkan dengan tetes besar, karena arus vertikal harus tinggi untuk menahan air di awan cukup lama untuk itu untuk menyatu ke dalam tetes besar. Jadi cuaca kekerasan memiliki radar yang lebih penampang dari jumlah yang sama dari air di lingkungan yang kurang kekerasan. Hamburan Rayleigh, dimana RCS dari setetes sebanding dengan kekuatan keempat frekuensi, juga kekacauan cuaca alasannya adalah lebih dari masalah pada frekuensi yang lebih tinggi. Drops yang memiliki satu unit RCS di L-Band (new D-Band) memiliki lebih dari 4.000 unit di Band X-, karena X-Band memiliki sekitar seperdelapan panjang gelombang L-Band dan tetes elektrik delapan kali lebih besar di X-Band, 84 = 4.096.
Optical-wilayah bola adalah case 0 target dan radar mereka penampang tidak memiliki ketergantungan aspek, membuat mereka target kalibrasi yang menarik. Spheres sering diterbangkan melekat pada balon untuk memberikan dikenal target RCS untuk menguji radar pelacakan. Untuk mendapatkan pergeseran Doppler, mereka dilempar keluar dari pesawat (tetes sphere) dan ditarik di belakang pesawat (TOWS sphere).
Contoh 4-4: Sebuah bola aluminium target kalibrasi berongga adalah 6 “diameter. Cari radar cross-section (wilayah optik) dan frekuensi terendah di mana dapat digunakan sebagai target radar optik.
Solusi: Luas lingkaran 6 “(0,152 m) adalah 0,0182 m2 ini yang RCS, -17.4 dBsm bola adalah optik jika lingkar lebih dari 5 sampai 10 panjang gelombang Menggunakan 5-panjang gelombang kriteria, frekuensi minimal… adalah 3,1 GHz Untuk lingkar 10-panjang gelombang,. frekuensi 6,3 GHz.
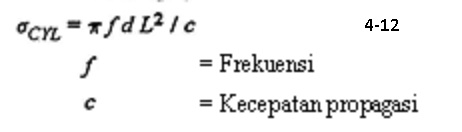
Cylinder RCS: Silinder (silinder melingkar tepat dianggap sini) memiliki selebaran gain antena seperti puncak sebanding dengan panjang mereka dalam panjang gelombang, dengan asumsi kedua lingkar dan panjang jauh lebih besar daripada panjang gelombang.
Dari Persamaan. 4-2 dan asumsi konduksi yang sempurna (I ‘= 1), radar selebaran puncak penampang silinder adalah
Cylinder RCS sangat aspek-dependent dan ditunjukkan pada Gambar. 4-14. Lobe lebar diberikan dalam Tabel 4-1. Adalah menarik bahwa selebaran (0 °) sidelobes aspek adalah 13,5 dB di bawah RCS puncak. Ini benar untuk objek rectangularly diterangi, yang silinder pada
Gambar 4-14. Cylinder RCS vs Aspect.
Aspek selebaran ini. Ujung-ujung, pada ± 90 °, adalah piring datar melingkar dengan 17 dB-sidelobes. Tingkat sidelobe untuk penerangan melingkar adalah 17 dB. Lihat Chs. 9 dan 11 untuk fungsi pencahayaan dan sidelobes. Cylinder RCS memiliki ketergantungan frekuensi orde pertama. Ditulis ulang dari segi frekuensi, RCS puncak silinder melakukan adalah
Flat plate RCS: Keuntungan dari antena collimated yang jauh lebih besar yang panjang gelombang adalah, dari Ch. 3
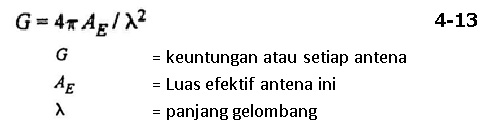
Daerah efektif piring datar yang seragam diterangi adalah daerah yang sebenarnya. Dari En. 4-2. Oleh karena itu, radar selebaran puncak penampang dari pelat datar adalah
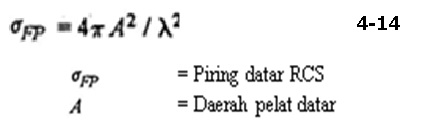
Flat plate RCS sangat tergantung aspek, seperti piring akhir (± 90 °) dari silinder Gambar. 4-14 pertunjukan. Lebar lobus utama diberikan pada Tabel 4-1. Flat plate RCS memiliki ketergantungan urutan frekuensi kedua, dan dalam hal frekuensi RCS puncak.
Contoh 4-5: Target kalibrasi yang menarik adalah silinder aluminium berongga dibangun sedemikian rupa sehingga selebaran nya (silinder) dan akhir (plat datar) radar lintas-bagian adalah sama. Desain silinder untuk RCS selebaran dan akhir 1,0 m2 di 10,0 GHz.
Solusi: Diameter silinder menetapkan RCS dari akhir piring. Persamaan 4-20 memberikan daerah dari target 1,0 puncak m2 RCS pelat datar pada 10,0 GHz sebagai 0,00846 m2. Diameter lingkaran dengan daerah ini adalah 0.104 di (4,1”). Panjang silinder dengan RCS dari 1,0 m2, diameter 0.104 m, dan frekuensi 10,0 GHz adalah 0,303 m (11,94 “) (Persamaan 4-17).
RCS Dipole: Radar lintas-bagian dari sebuah dipol sebagai fungsi dari frekuensi ditunjukkan pada Gambar. 4-15. Nilai puncaknya dari 0,88 X2 terjadi ketika dipol adalah setengah panjang gelombang (pada dipole) panjang dan berorientasi searah E-Fields dan tegak lurus terhadap arah propagasi. Nilai rata-rata untuk semua orientasi dan polarisasi adalah sekitar 0,15 X2. Dipol membentuk sekam, suatu bentuk ECM. Sekam dibahas kemudian dalam bab ini.
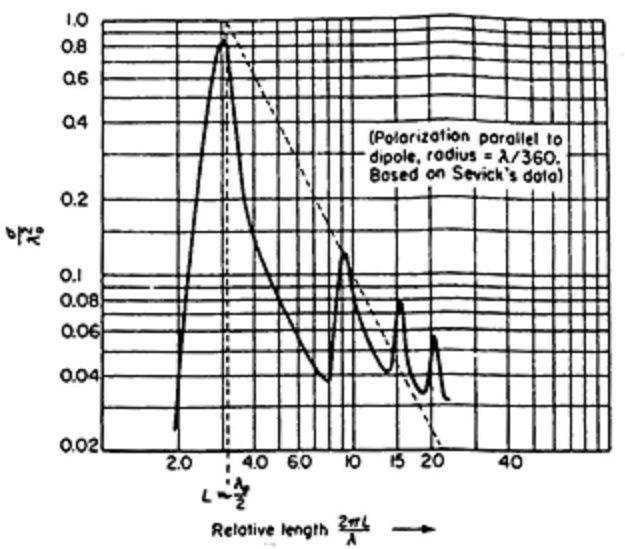
Figure 4-15. Dipole RCS vs panjang relatif target
Corner reflector RCS: reflektor sudut adalah pelat diatur sedemikian rupa sehingga mereka mencerminkan energi elektromagnetik atas aspek yang luas. Prinsip ini ditunjukkan pada Gambar. 4-16. Gambar 4-17 memberikan RCS vs aspek untuk reflektor sudut segitiga. Puncak RCS adalah

Sudut reflektor berperilaku sangat banyak seperti pelat datar, dengan penilaian setara RCS dan respon frekuensi. Perbedaannya adalah bahwa, untuk ukuran tertentu, puncak RCS lobus sudut reflektor jauh lebih luas daripada pelatnya, ketika digunakan dengan sengaja, untuk sasaran augmentasi. Ketika mereka terjadi secara tidak sengaja, pada persimpangan sayap dan badan pesawat pesawat terbang, mereka berkontribusi tinggi RCS.
Luneburg lens RCS: Lensa Lüneburg [12] adalah perangkat yang mencerminkan ke arah dari mana daya tiba. Mereka mirip dengan reflektor sudut dalam hal ini, tetapi memiliki lobus utama yang lebih luas. Pembangunan lensa Lüneburg ditunjukkan pada Gambar. 4-18.
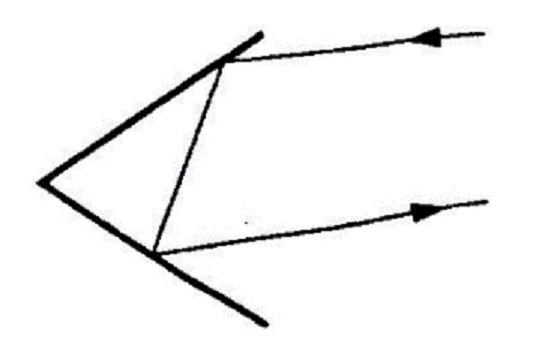
Figure 4-16. Corner Reflector Principle.
Gambar 4-17. Pola radiasi Corner Reflector RCS
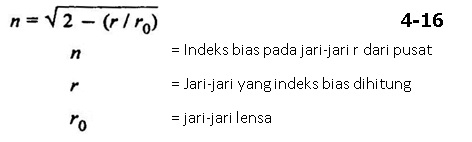
Ini adalah dielektrik tubuh dengan berbagai indeks bias. Insiden gelombang elektromagnetik dari fokus arah tertentu untuk sebuah tempat di permukaan belakang lensa, di mana mereka mencerminkan off topi melakukan dan keluar dari arah yang sama dari mana mereka masuk. Oleh karena itu mereka berperilaku sebagai piring datar, namun dengan lobus yang jauh lebih luas. Mereka banyak digunakan sebagai augmentors. Augmentasi Gambar. 4-12 bisa, misalnya, dilakukan dengan lensa Lüneburg.
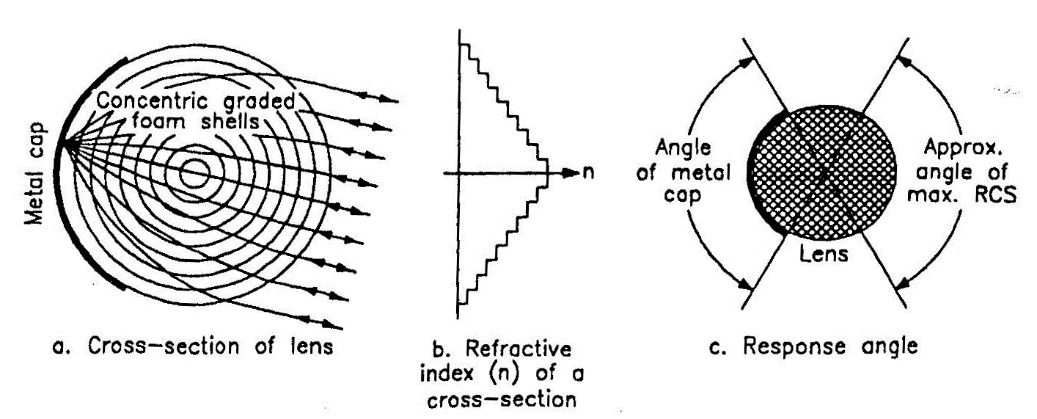
Gambar 4-18. Lüneburg Lens Prinsip.
Untuk mencapai efek yang diinginkan, indeks bias di lensa harus mematuhi hubungan berikut:
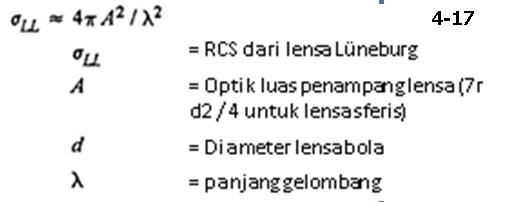
Radar puncak lintas-bagian lensa Lüneburg adalah sekitar bahwa dari pelat datar dengan ukuran yang sama, mengabaikan kerugian dielektrik, dan
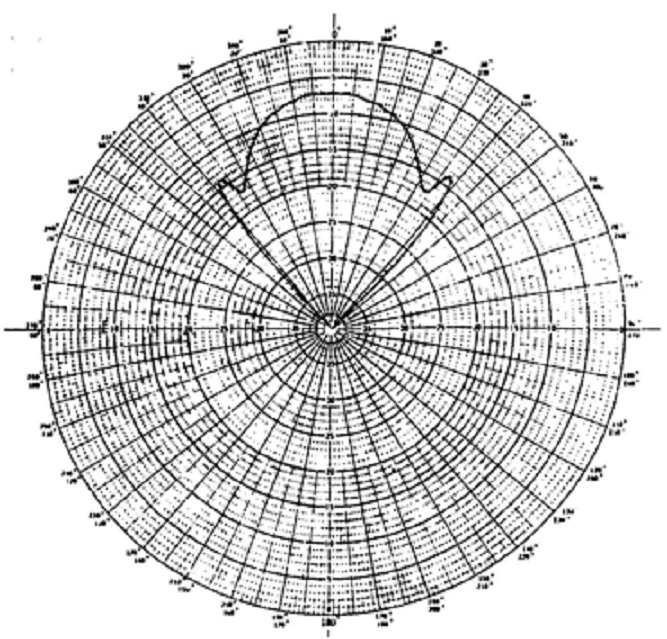
Lebar dari lobus respon utama adalah sekitar sudut subtended dari tutup logam, dengan batas sekitar 120 °, di luar yang tutup “nuansa lensa berlebihan (Gambar 4-18c). Radar penampang terhadap aspek lensa Lüneburg ditunjukkan pada Gambar. 4-19.
Contoh 4-6: Lensa Lüneburg biasanya digunakan sebagai augmentors dan tersedia secara komersial dalam beberapa ukuran. Perkirakan RCS puncak lensa 8 “diameter ke X-Band (10,0 GHz) radar.
Solusi: Luas lingkaran 8 “(0,203 m) adalah 0,0324 m2 panjang gelombang adalah 0,03 m.. Persamaan 4-19 atau Persamaan. 4-23 memberikan RCS dari sepiring ukuran ini, yaitu 14,7 m2, atau 11,7 dBsm .
4-5. Radar Cross-Section of Objects Kompleks
Interaksi scatterers beberapa, ditunjukkan dalam Sec. 4-2, menyumbang fluktuasi target paling. Target kompleks dapat dimodelkan sebagai array dari pusat hamburan individu (Gambar 4-11). Beberapa model sasaran memperlakukan scatterers individu sebagai isotropik (N-Point model) dan lain-lain memperlakukan mereka sebagai non-isotropik bentuk sederhana, seperti silinder dan pelat datar (N-Shape model). Jika scatterers individu yang membentuk target yang kira-kira sama di RCS, kasus Swerling 1 atau 2 hasil target. Jika salah satu scatterer mendominasi, komposit adalah kasus 3 atau 4 target.
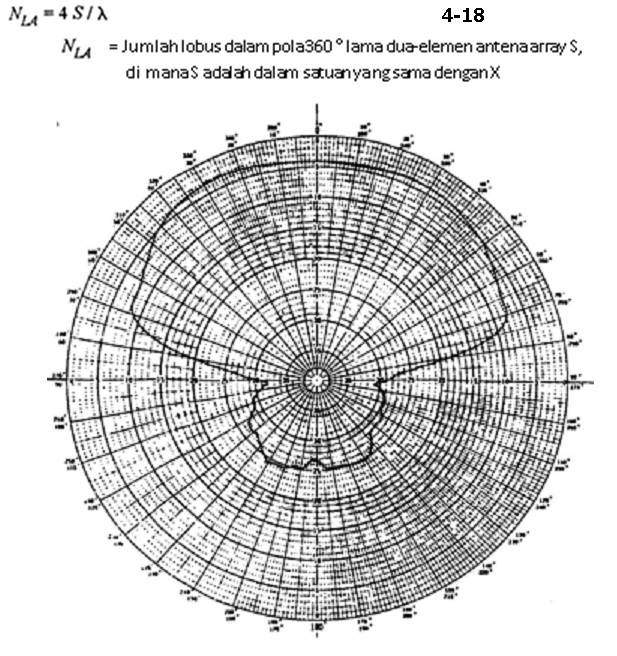
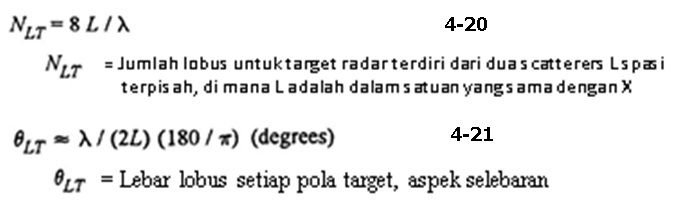
Jarak dari lobus dalam menanggapi target tergantung pada jarak scatterer dalam panjang gelombang. Untuk array antena, jumlah lobus dihasilkan oleh unsur-unsur spasi Sapart, dan lebar lobus masing-masing diberikan sebagai
Gambar 4-19. Lüneburg Lens RCS.

Untuk target radar, array secara efektif dua kali lebih lama sebagai antena karena dua arah propagasi radar.
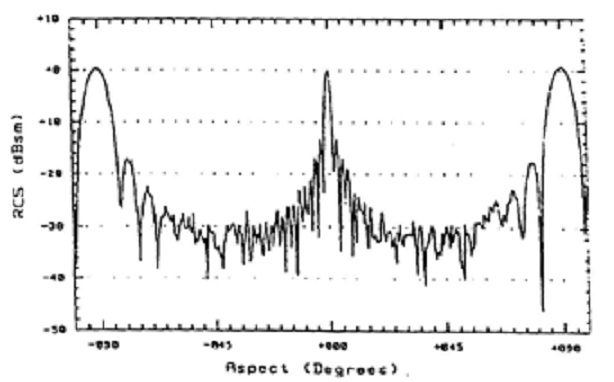
Gambar 4-20 menunjukkan pesawat T-33Ajet pelatihan, yaitu sekitar 30 kaki panjang, hasa lebar sayap sekitar 40 kaki, dan memiliki tangki bahan bakar yang besar silinder pada ujung sayap masing-masing. Gambar 4-21 adalah kilau RCS vs aspek pola pesawat ini pada 425 MHz. Para scintillations, yang terjadi selama sekitar enam perintah besarnya, adalah hasil dari scatterers kira-kira sama banyak spasi banyak panjang gelombang terpisah. Lebar sayap adalah sekitar 17 panjang gelombang pada frekuensi ini, memprediksi lebar hidung lobus aspek sekitar 1,7 ° (Persamaan 4-27). Untuk radar konstan frekuensi target ini Swerling kasus 1, kecuali pada rentang yang sangat singkat di mana mungkin terjadi 2. Untuk radar pulsa-to-pulsa frekuensi tangkas itu adalah kasus 2.

Gambar 4-20. Pesawat T-33A
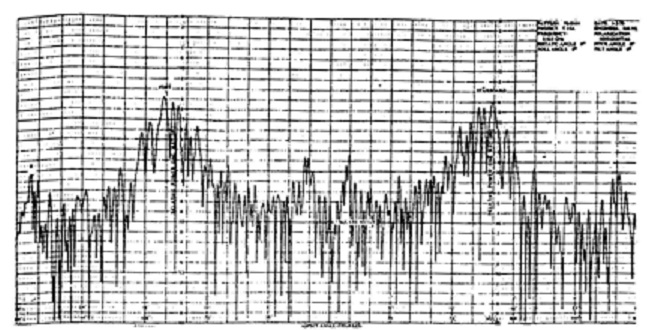
Gambar 4-21. Pesawat T-33A di 425 MHz
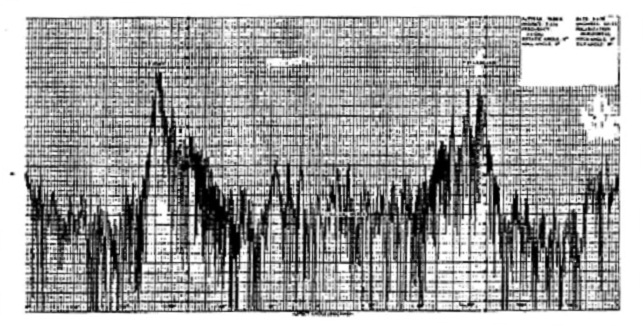
Gambar 4-22 menunjukkan pesawat yang sama di 3 GHz. Lebar sayap ini sekarang sekitar 120 panjang gelombang, untuk lebar lobus pada aspek hidung sekitar 0,23 °. Pola RCS memiliki bentuk yang sama, tetapi periode kilau yang jauh lebih pendek.
Struktur halus dari aspek dibandingkan RCS dari target besar seperti pesawat terbang terkadang menyembunyikan fitur-fitur utama dan tren dalam informasi. Untuk alasan ini, data untuk target jenis ini biasanya disajikan sebagai perusahaan RCS median selama rentang aspek tertentu. Hal ini dikenal sebagai data RCS medianized. Gambar 4-23 adalah contoh data hipotetis medianized (T-33A tidak), menunjukkan 10 ° median.
4-6. Glint (berkilau)
Radar penampang target berfluktuasi di kedua amplitudo (kilau) dan fase (kilatan). Kilatan menyebabkan front fase medan jauh dari gelombang yang dipantulkan untuk menjadi non-planar. Angka 4-24 dan 4-25 menunjukkan model target yang berguna untuk memvisualisasikan kilatan. Ini adalah dua
Gambar 4-22. Pesawat T-33A di 3,0 GHz.
Gambar 4-23. Hipotesis Medianized RCS data.
isotropik scatterers dipisahkan oleh satu panjang gelombang, satu scatterer memiliki RCS dari 1,0 Unit dan yang lainnya RCS dari 0,81 unit. Respon medan listrik adalah rasio 1:0.9. Gambar 4-24 adalah respon amplitudo terhadap sudut aspek. Jumlah dari dua scatterers berfluktuasi 0,01-3,61 unit RCS (0,1-1,9 unit medan listrik).
Oleh Persamaan. 4-26 ada delapan lobus, seperti yang terlihat pada gambar. Tahap setiap alternatif lobus antara 0 ° (selebaran dan akhir lobus) dan 180 °. Pada nol setiap fase perubahan dan itu adalah perubahan yang menyebabkan kilatan target.
Gambar 4-25 plot untuk satu instan waktu front echo gelombang merambat jauh dari target. Di transisi antara 0 ° dan 180 ° fase, front gelombang tidak tegak lurus searah propagasi. Karena semua antena, termasuk mata kita, mengidentifikasi sinyal angle-of-kedatangan (AOA) berasal dari arah tegak lurus terhadap gelombang, hasil sudut kesalahan.
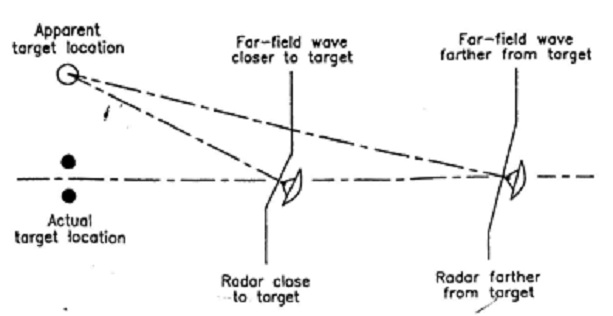
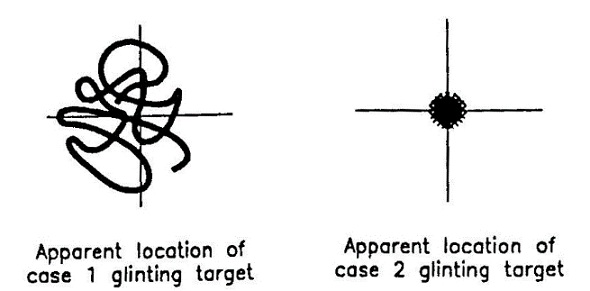
Gambar 4-26 menunjukkan AOA jelas dari target berkilauan di rentang yang berbeda. Karena perubahan fasa selama dua scatterers konstan (180 ° selama dua scatterers – berbeda untuk nomor lain scatterers), sudut kemiringan gelombang menjadi dangkal pada rentang lama. Terlepas dari jangkauan, lokasi jelas dari target berkilauan tetap konstan, kecuali tentu saja perubahan frekuensi aspek target atau iluminasi.
Gambar 4-27 menggambarkan front gelombang dari target berkilauan hipotetis yang kompleks. Dalam kasus ini, kilatan muncul sebagai “noise” pada gelombang yang berkontribusi terhadap ketidakpastian di lokasi target.
Gambar 4-26. Sasaran Pergeseran Lokasi jelas Disebabkan oleh Glint.
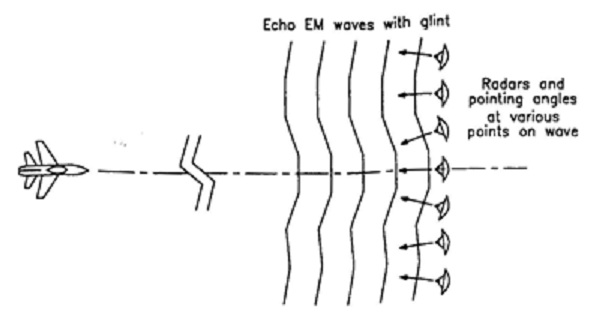
Gambar 4-27. Front gelombang dari Target berkilauan Kompleks.
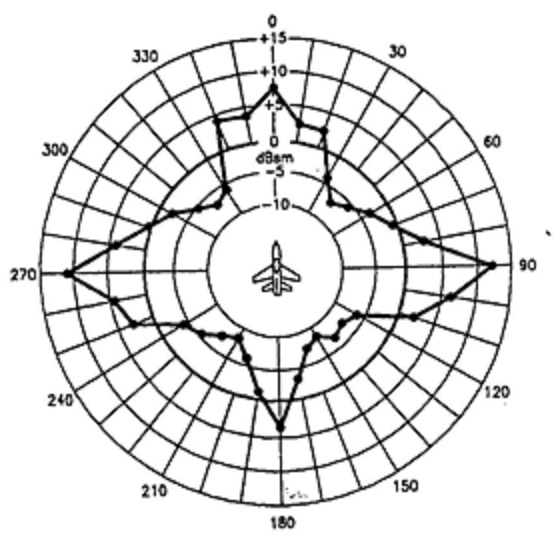
Gambar 4-28 menunjukkan data eksperimen dari pesawat skala-model. Model, ditampilkan pada plot dalam ukuran sebenarnya relatif terhadap skala plot, ditempatkan pada positioner dan radar pelacakan dikunci untuk itu. Target itu kemudian diputar cukup lambat sehingga servos pelacakan lokasi diikuti jelas target. Plot adalah lokasi ini jelas, di mana radar “berpikir” target itu. Seandainya rotasi target yang telah dihentikan, radar akan diadakan posisinya. Sebuah distribusi kumulatif dari posisi target yang jelas diambil dari data ini akan menunjukkan bahwa radar itu menunjuk dari target dalam 5 persen menjadi 15 persen dari sampel, tergantung pada berbagai sudut aspek dianalisis.
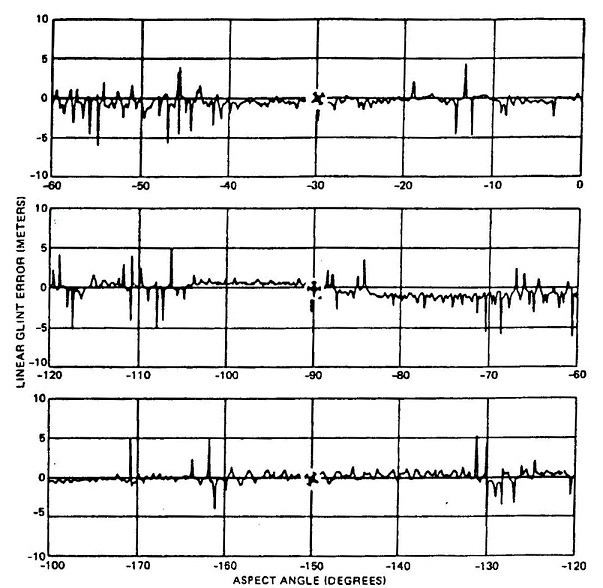
Gambar 4-28. Semu Lokasi Model Aircraft.
Kilatan kesalahan linier kecil, target beberapa mencakup paling banyak. Pada rentang pendek, bagaimanapun, kesalahan sudut bisa besar. Sistem yang paling terkena dampak pelacakan radar di mana akurasi tinggi diperlukan, seperti pelacak instrumentasi presisi, pencari rudal, radar mengarahkan senjata, dan sistem otomatis pesawat mendarat.
Cepatnya fluktuasi sangat mempengaruhi kilatan-induced kesalahan posisi. Jika target berfluktuasi perlahan (kasus 1 dan 3), servos pelacakan dapat mengikuti target yang tampaknya menggeser posisi dan kesalahan yang substansial. Jika fluktuasi yang cepat (kasus 2 dan 4), servos, dengan bandwidth biasanya kurang dari 10 Hz, rata-rata lokasi target dan menghasilkan sebuah lagu yang lebih akurat. Salah satu cara untuk mengubah kasus target 1/3 ke dalam kasus 2/4 adalah dengan pulsa ¬ ke-pulsa frekuensi kelincahan. Lihat Gambar. 4-29. Mode pistol radar direktur Banyak di pulsa sebenarnya ¬ ke-pulsa frekuensi tangkas. Kilatan karena mempengaruhi akurasi track diperiksa lebih lanjut di Ch. 7.
Gambar 4-29. Pengaruh kecepatan Glint tentang kedudukan semu ke Radar Track.
4-7. Bistatic Radar Cross-Section
Kebanyakan target berperilaku berbeda untuk radar bistatic daripada monostatic. Angka 4-3 dan 4-4 memberikan contoh. Pada aspek mana target digambarkan memiliki RCS minimum untuk radar monostatic, itu RCS maksimum untuk sistem bistatic dengan sudut bistatic dari 28,32 °. Gambar 4-30 menunjukkan piring datar berorientasi sehingga menyajikan RCS rendah untuk radar monostatic tapi tinggi RCS bistatic.
Geometri bistatic dan definisi akan ditampilkan dalam Sec. 3-15. Informasi lebih lanjut tentang RCS bistatic dapat ditemukan di Morchin [5] dan referensi lainnya (lihat bagian Informasi lebih lanjut).
Hal ini juga diketahui bahwa ketika sudut bistatic mendekati 180 °, RCS dari semua target, termasuk target menyerap, menjadi besar. Hal ini karena difraksi dari “lubang” menekan gelombang elektromagnetik oleh target, ditunjukkan pada Gambar. 4-31. Dalam batas (sudut bistatic sama dengan 180 °) semua target, termasuk peredam, memiliki RCS dari piring datar ukuran gelombang EM “lubang” berorientasi untuk respon maksimum.
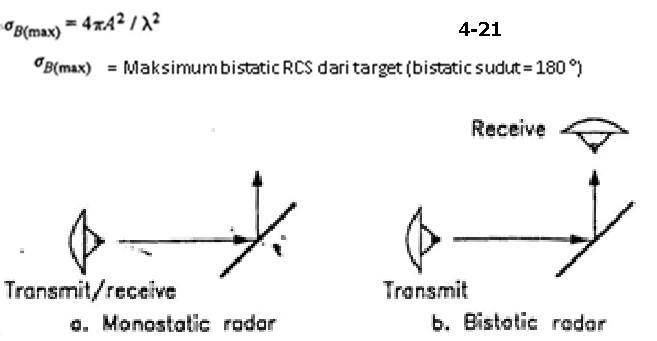
Gambar 4-30. Pelat datar – monostatic dan bistatic.
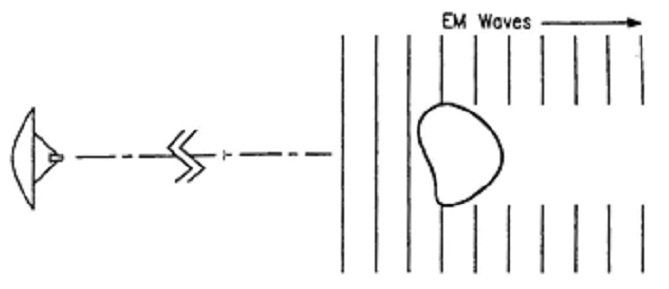
Gambar 4-31. EM “Lubang ‘di Angles bistatic besar.
Muhammad Yudha Pratama
175060300111008
Hadir
Muhammad Yasir Tantana
175060307111031
Hadir
Hanifah Faradillah Sari
175060300111053
Hadir
Hilmi Setyawan Aji
175060301111018
Hadir
Perdana Bintang R
175060301111003
Hadir
Perdana bintang R – 175060301111003 – Hadir
Irfan Madani Pratama
175060301111019
Hadir
Muhammad Wisem Royyan
175060300111013
Hadid
Navila Firliyana Ramadhan
175060301111029
Hadir
Abednego Bogi Christian
165060300111043
HADIR
Sofiatus Solihah
175060301111006
Hadir
Muhammad Naufal
175060307111039
Hadir
Gamal Alief Satria
175060309111031
Hadir
Gamal Alief Satria
175060300111031
Hadir
Ika Dwi Cahyanti
175060301111002
Hadir
Farid Shalahuddin
175060307111042
Hadir
Desy Natalia
175060300111007
Hadir